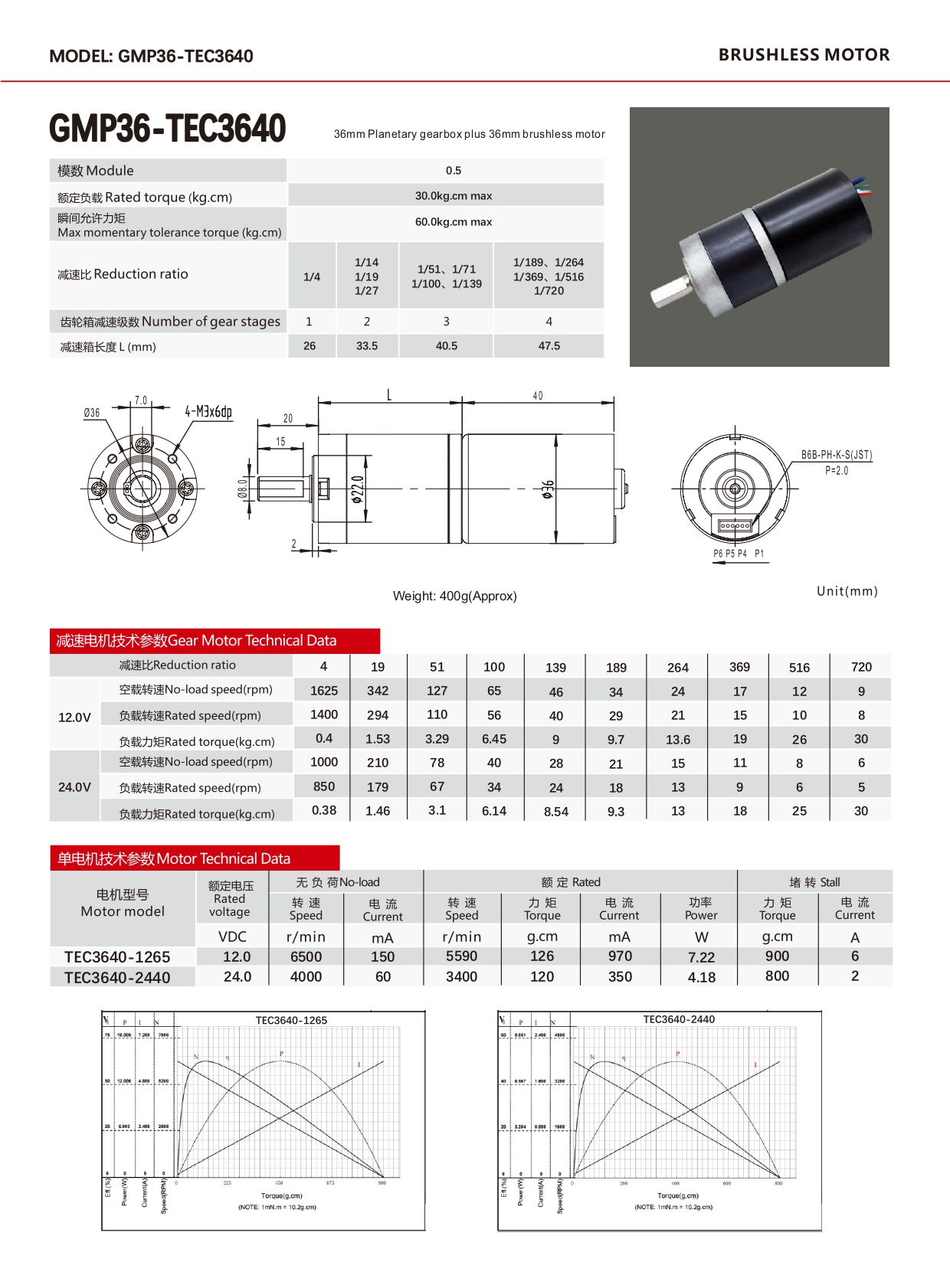
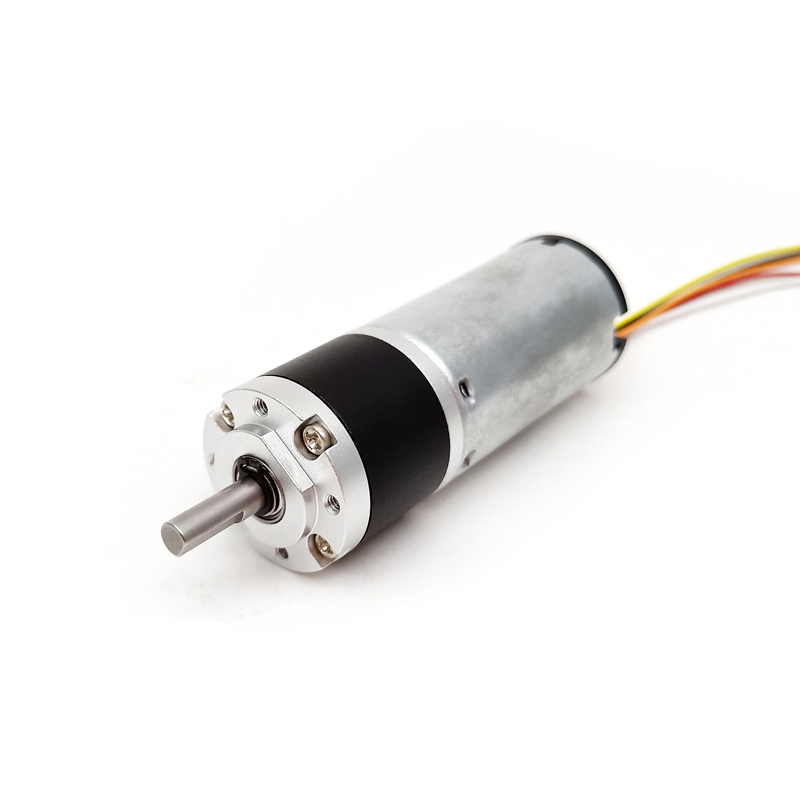
GMP36-TEC3640 Motore à ingranaggi planetarii senza spazzole da 36 mm Motore à ingranaggi BLDC à coppia elevata 12V 24V per automazione industriale è AGV





Alta Densità di Coppia: U mutore senza spazzole di 36 mm hè ottimizatu per un flussu magneticu elevatu, furnendu una coppia cuntinua impressiunante. U riduttore planetariu multiplica ulteriormente sta coppia, permettendu à l'unità di guidà carichi pesanti à bassa velocità cù alta efficienza (tipicamente > 85% in generale).
Affidabilità senza spazzole: Senza spazzole da usurà, questu mutore offre una vita operativa eccezziunale (più di 10.000 ore tipiche) è un funziunamentu praticamente senza manutenzione. Produce ancu menu rumore elettricu è una efficienza più elevata cà l'alternative à spazzole.
Lunghezza assiale compatta: Cù solu 40 mm di lunghezza (escludendu l'albero), questu motoriduttore hè particularmente cortu per u so diametru, ciò chì u rende ideale per l'applicazioni induve a prufundità hè limitata ma a larghezza hè dispunibule.
Riduttore planetariu di precisione: U riduttore multistadio hè dotatu di ingranaggi in acciaio tempratu è cuscinetti di precisione per minimizà u ghjocu (<1-2° tipicu). Diversi rapporti di riduzione da 5:1 à 500:1 sò dispunibili per risponde à i requisiti di velocità/coppia.
Opzioni di Feedback Integrate: I sensori Hall o encoder ponu esse integrati per u cuntrollu di velocità è di pusizione in circuitu chjusu. Opzioni di avvolgimentu persunalizate sò dispunibili per i sistemi 12V o 24V.
Veiculi à guida automatica (AGV): Aduprati cum'è motori di e rote motrici o attuatori di u mecanismu di sollevamentu in i robot di magazzinu è i veiculi di movimentazione di materiali.
Automatizazione Industriale: Ideale per tavule di indicizazione, azionamenti di trasportatori è attuatori di linee di assemblaggio automatizate chì richiedenu un cuntrollu di muvimentu precisu.
Robot Collaborativi (Cobot): Adatti per attuatori cumuni in cobot di carica utile ligera induve a cumpattezza è u muvimentu fluidu sò essenziali.
Attrezzatura medica: Aduprata in tavule chirurgiche, elevatori di pazienti è meccanismi di pusizionamentu di sistemi di imaging.